
Master Thesis: Robotics Motion Planning and Control in the Wild through Camera Neural Perception
Date:
🎓 Overview
This master thesis presents a comprehensive study on robot motion planning and control in real-world environments using camera-based neural perception. The project integrates robotics, computer vision, and control systems to enable autonomous navigation in unknown and dynamic environments.
The work was conducted as part of the Master in Mobile, Autonomous and Robotic Systems at Grenoble-INP ENSE3, under the supervision of Thibault Neveu.
📄 Full Report: Download Master Thesis (PDF)
📄 Slide Presentation: Download Master Thesis Slide Presentation
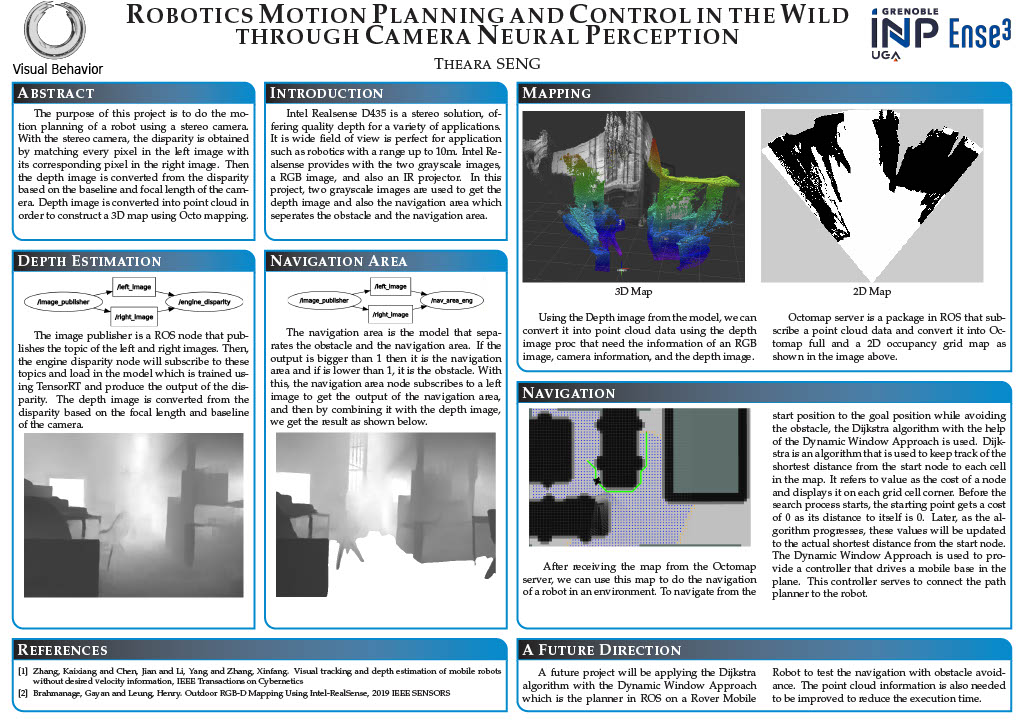
🖼️ Research Poster
🎯 Objectives
The primary objective of this research is to design a robotic system capable of:
- Navigating autonomously from a start to a goal position
- Avoiding obstacles in unknown environments
- Building maps of surroundings in real time
- Using camera-based perception instead of pre-built maps
As stated in the thesis, the core challenge in robotics is answering:
“Where am I?” and “Where am I going?” :contentReference[oaicite:1]{index=1}
🧠 Key Contributions
1. 🚁 Quadcopter Modeling and Control
- Developed a dynamic model of a quadcopter using Newton and Euler laws
- Applied Model Predictive Control (MPC) for trajectory tracking
- Linearized the nonlinear system for control optimization
✔ Result: Accurate trajectory tracking in simulation environments
2. 🎥 Camera-Based Depth Estimation
- Implemented stereo vision to compute depth from image disparity
- Used pinhole camera model for coordinate transformations
- Converted disparity into depth using camera parameters
✔ Result: Depth perception without LiDAR using only cameras
3. 🗺️ 3D Mapping and Environment Representation
- Used Airsim simulator to generate RGB + depth data
- Converted depth images into point cloud data (ROS)
- Built environment maps using OctoMap (3D occupancy grid)
✔ Result: Real-time 3D mapping of unknown environments
4. 📷 RealSense-Based Perception System
- Integrated Intel RealSense D435 stereo camera
- Generated:
- Depth images
- Navigation area segmentation
- Combined perception outputs for improved navigation
✔ Result: Practical perception pipeline for real robots
5. 🤖 Mobile Robot Navigation
- Implemented Dijkstra Algorithm for path planning
- Used Dynamic Window Approach (DWA) for motion control
- Built 2D occupancy grid maps for navigation
✔ Result: Autonomous navigation from start to goal with obstacle avoidance
⚙️ Technologies Used
- ROS (Robot Operating System)
- Airsim Simulator
- Gazebo Simulator
- Intel RealSense D435
- Python & C++
- OctoMap
- RViz Visualization
📊 System Architecture
The system integrates multiple layers:
- Perception Layer
- Stereo vision → Depth map
- Depth → Point cloud
- Mapping Layer
- Point cloud → OctoMap
- 3D → 2D occupancy grid
- Planning Layer
- Dijkstra algorithm (global path)
- Control Layer
- MPC (quadcopter)
- DWA (mobile robot)
🎥 Demo Video
🚀 Key Results
- Successful trajectory tracking of quadcopters using MPC
- Real-time 3D environment mapping
- Camera-based depth estimation using Realsense Camera
- Fully functional autonomous navigation system
🔮 Future Work
The thesis suggests several improvements:
- Integration of deep learning-based perception models
- Real-world deployment beyond simulation
- Optimization of computational performance
- Multi-sensor fusion (camera + IMU + LiDAR)
🧑💻 Author
Theara Seng
Master in Mobile, Autonomous and Robotic Systems
University Grenoble Alpes (France)
📌 Notes
This thesis reflects my strong interest in:
- Robotics & Autonomous Systems
- Computer Vision
- AI-driven perception
- Real-world robot deployment
It also forms the foundation of my current work in AI-powered robotics and IoT systems.