YOLOv8 Red & Green Object Detection
Published:
YOLOv8 Red & Green Object Detection
Raspberry Pi Deployment Guide
This project demonstrates how to train, convert, and deploy a YOLOv8 model for red and green color object detection using a dataset from Roboflow.
⚙️ Configuration Overview
| Item | Description | Recommended |
|---|---|---|
| Model Architecture | YOLOv8n (Nano) | Lightweight for Raspberry Pi |
| Image Size | 320 × 320 | Balance between accuracy and speed |
| Batch Size | 16 | Adjust if memory is limited |
| Training Epochs | 200 | Stop earlier if loss stabilizes |
| Confidence Threshold | 0.4–0.5 | Filter weak detections |
| ONNX Opset Version | 12 | Compatible with ONNX Runtime 1.16+ |
| Raspberry Pi Model | Pi 4 (2GB to 4GB) | 64-bit OS recommended |
| Camera | USB or CSI camera | Test with cv2.VideoCapture(0) |
| Python Version | 3.10+ | Ensure venv and pip installed |
1. Download Dataset from Roboflow
You will train the model using a dataset hosted on Roboflow.
- Open your dataset page on Roboflow: 👉 YOLOv8 Red-Green Detection Dataset
Click Download Dataset → YOLOv8 format
Then extract it inside your project folder.The folder structure should look like this:
├── train/
├── valid/
├── data.yaml
- Inside your
data.yaml, confirm that it contains something like this:train: ../train/images val: ../valid/images nc: 2 names: ['redbox', 'greenbox']
2. Set Up Training Environment (on Windows)
This section explains how to prepare your environment on Windows for training YOLOv8.
- Open PowerShell in your project folder.
Create a new Python virtual environment: ```bash python -m venv yolo
Activate the environment: ```bash .\yolo\Scripts\activate
PyTorch CUDA build (current default index provides CUDA-enabled wheels) ``` pip install –upgrade pip pip install torch torchvision torchaudio –index-url https://download.pytorch.org/whl/cu121
# Ultralytics (YOLOv8) pip install ultralytics
- Verify installation:
yolo version ## 3. Train the YOLOv8 Model Train your YOLOv8 model using your Roboflow dataset.yolo detect train model=yolov8n.pt data=data.yaml imgsz=320 epochs=10 batch=16 device=0 ``` we use the device=0 to train using GPU. If your laptop doesn’t have the gpu, you can train on google colab
After training, your weights will be located at:
runs\detect\train\weights\best.pt
4. Testing the model on Laptop
Below code is used for testing model and detection with best.pt on laptop
from ultralytics import YOLO
import cv2
# --- Load your trained YOLOv8 model ---
model = YOLO("best.pt") # make sure best.pt is in the same folder as this script
# --- Open webcam (0 = default cam, or replace with video path or image folder) ---
cap = cv2.VideoCapture(0) # use 0, 1, or a file path like 'video.mp4'
if not cap.isOpened():
print("Cannot open webcam")
exit()
print("✅ Webcam opened successfully. Press 'q' to quit.")
while True:
ret, frame = cap.read()
if not ret:
print("Frame grab failed.")
break
# --- Run YOLOv8 inference on the frame ---
results = model(frame, stream=True)
# --- Process detections ---
for r in results:
boxes = r.boxes
for box in boxes:
cls_id = int(box.cls[0])
conf = float(box.conf[0])
label = model.names[cls_id]
# Get coordinates
x1, y1, x2, y2 = map(int, box.xyxy[0])
# Draw box and label
color = (0, 255, 0) if label == "greenbox" else (0, 0, 255)
cv2.rectangle(frame, (x1, y1), (x2, y2), color, 2)
cv2.putText(frame, f"{label} {conf:.2f}", (x1, y1 - 10),
cv2.FONT_HERSHEY_SIMPLEX, 0.7, color, 2)
print(f"Detected: {label} (conf {conf:.2f})")
# --- Show the result ---
cv2.imshow("YOLOv8 Detection", frame)
# Exit on 'q'
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
5. Export Model to ONNX (For Raspberry pi)
yolo export model=best.pt format=onnx imgsz=320 opset=12 dynamic=False simplify=False nms=True
6. Transfer Model to Raspberry pi
scp best.onnx aupp@pi-ip:/home/aupp/Documents/
7. Create and activate virtual environment
python3 -m venv ~/yolo && source ~/yolo/bin/activate
Install Python Package
pip install --upgrade pip
pip install "numpy==1.23.5" onnxruntime==1.16.3 flask==3.0.0 opencv-python-headless==4.9.0.80
8. Testing ONNX on The webstream with Raspberry pi
The code below is used for testing the model of the red-green detection with rapberry pi
#!/usr/bin/env python3
import os, time, cv2
from threading import Thread, Lock
from flask import Flask, Response, jsonify, make_response
from ultralytics import YOLO
# -------- config --------
MODEL_PATH = "onnx_path" # put best.onnx next to this app.py
CAM_INDEX = 0
IMG_SIZE = 320
CONF = 0.5
# -------- model --------
model = YOLO(MODEL_PATH)
# -------- camera thread --------
class Camera:
def __init__(self, index=0, width=None, height=None):
self.cap = cv2.VideoCapture(index)
if width: self.cap.set(cv2.CAP_PROP_FRAME_WIDTH, width)
if height: self.cap.set(cv2.CAP_PROP_FRAME_HEIGHT, height)
self.ok, self.frame = self.cap.read()
self.lock = Lock()
self.running = True
self.t = Thread(target=self.update, daemon=True)
self.t.start()
def update(self):
while self.running:
ok, f = self.cap.read()
if ok:
with self.lock:
self.ok, self.frame = ok, f
else:
time.sleep(0.01)
def read(self):
with self.lock:
return self.ok, None if self.frame is None else self.frame.copy()
def release(self):
self.running = False
time.sleep(0.05)
self.cap.release()
cam = Camera(CAM_INDEX)
# -------- flask --------
app = Flask(__name__)
INDEX_HTML = """<!doctype html>
<html lang="en">
<head>
<meta charset="utf-8">
<title>YOLOv8 ONNX - Raspberry Pi Stream</title>
<meta name="viewport" content="width=device-width,initial-scale=1">
<style>
:root { color-scheme: light dark; }
body { margin:0; min-height:100vh; display:grid; place-items:center;
background:#0b0c10; color:#eaf0f6; font-family:system-ui,Segoe UI,Roboto,sans-serif; }
.card { width:min(96vw,900px); background:#111417; border-radius:16px; padding:14px;
border:1px solid rgba(255,255,255,0.08); box-shadow:0 10px 40px rgba(0,0,0,.35); }
h1 { margin:6px 0 10px; font-size:1.05rem; }
.row { display:flex; gap:10px; justify-content:space-between; align-items:center; }
.btn { border:1px solid rgba(255,255,255,.12); background:#1b2229; color:#eaf0f6;
padding:6px 12px; border-radius:10px; cursor:pointer; font-weight:600; }
.btn:hover { background:#222b33; }
.frame { width:100%; aspect-ratio:16/9; background:#0d1117; border-radius:12px; overflow:hidden;
border:1px solid rgba(255,255,255,0.08); display:grid; place-items:center; }
img { width:100%; height:100%; object-fit:contain; }
small { opacity:.65; }
</style>
</head>
<body>
<div class="card">
<div class="row">
<h1>Raspberry Pi • YOLOv8 (ONNX) Live</h1>
<button class="btn" onclick="reloadStream()">Reload</button>
</div>
<div class="frame">
<img id="stream" src="/stream" alt="Stream">
</div>
<div class="row" style="margin-top:8px;">
<small>Status: <span id="health">checking…</span></small>
<small>URL: <code id="url"></code></small>
</div>
</div>
<script>
async function checkHealth() {
try {
const r = await fetch('/health', {cache:'no-store'});
const j = await r.json();
document.getElementById('health').textContent = j.camera_ok ? 'camera OK' : 'no camera';
} catch (e) {
document.getElementById('health').textContent = 'server offline';
}
}
function reloadStream() {
const img = document.getElementById('stream');
img.src = '/stream?ts=' + Date.now();
}
document.getElementById('url').textContent = location.href;
checkHealth(); setInterval(checkHealth, 4000);
</script>
</body></html>
"""
@app.route("/")
def index():
return make_response(INDEX_HTML, 200)
@app.route("/health")
def health():
ok, _ = cam.read()
return jsonify({"camera_ok": bool(ok)})
def gen_mjpeg():
while True:
ok, frame = cam.read()
if not ok or frame is None:
time.sleep(0.02)
continue
results = model.predict(frame, imgsz=IMG_SIZE, conf=CONF, verbose=False)
annotated = results[0].plot()
# optional resize to cut bandwidth/CPU:
# annotated = cv2.resize(annotated, (640, 360))
ok, jpg = cv2.imencode(".jpg", annotated, [cv2.IMWRITE_JPEG_QUALITY, 80])
if not ok:
continue
b = jpg.tobytes()
yield (b"--frame\r\n"
b"Content-Type: image/jpeg\r\n"
b"Cache-Control: no-cache\r\n"
b"Content-Length: " + str(len(b)).encode() + b"\r\n\r\n" + b + b"\r\n")
@app.route("/stream")
def stream():
return Response(gen_mjpeg(), mimetype="multipart/x-mixed-replace; boundary=frame")
if __name__ == "__main__":
try:
app.run(host="0.0.0.0", port=5000, threaded=True)
finally:
cam.release()
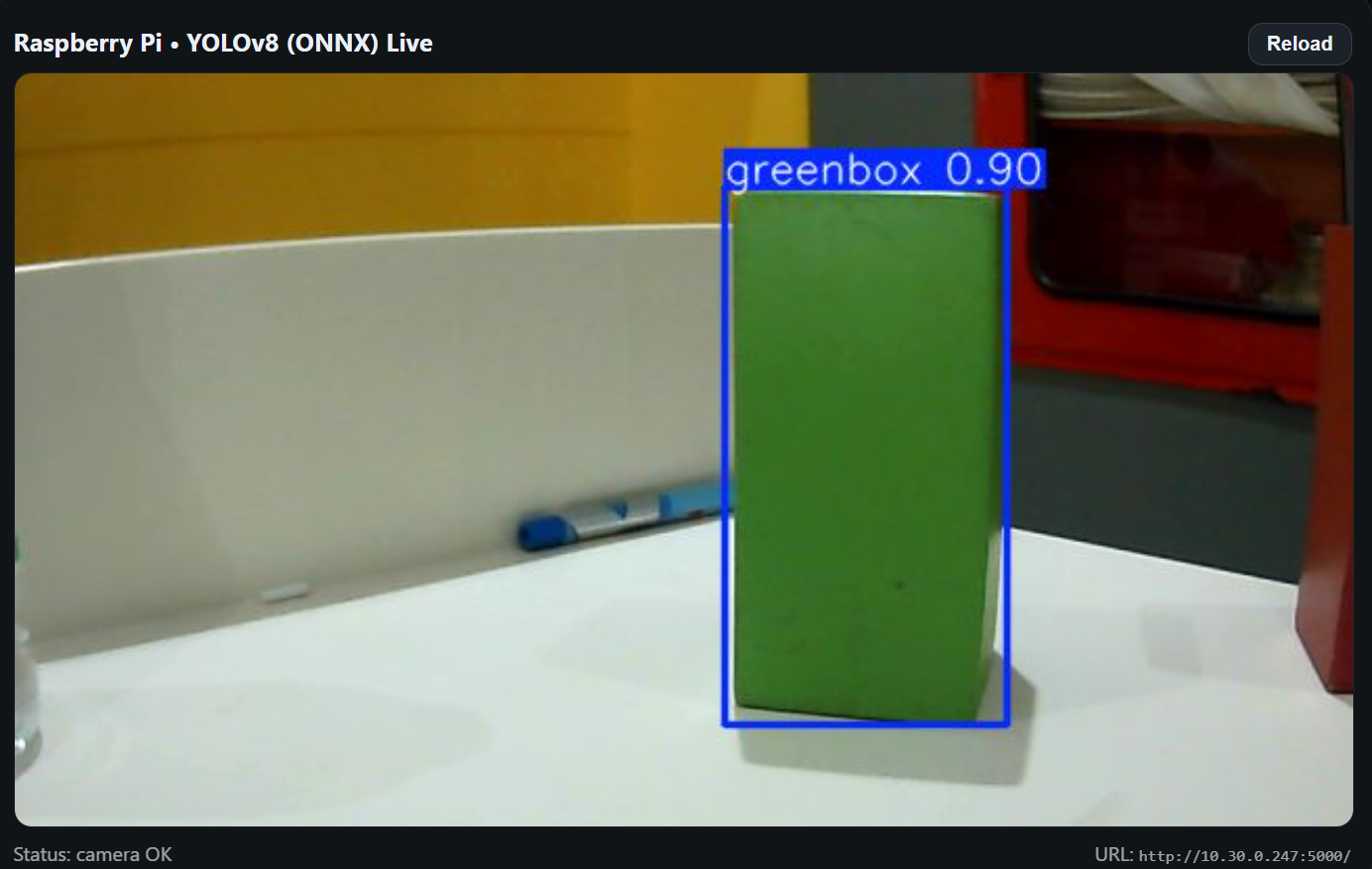
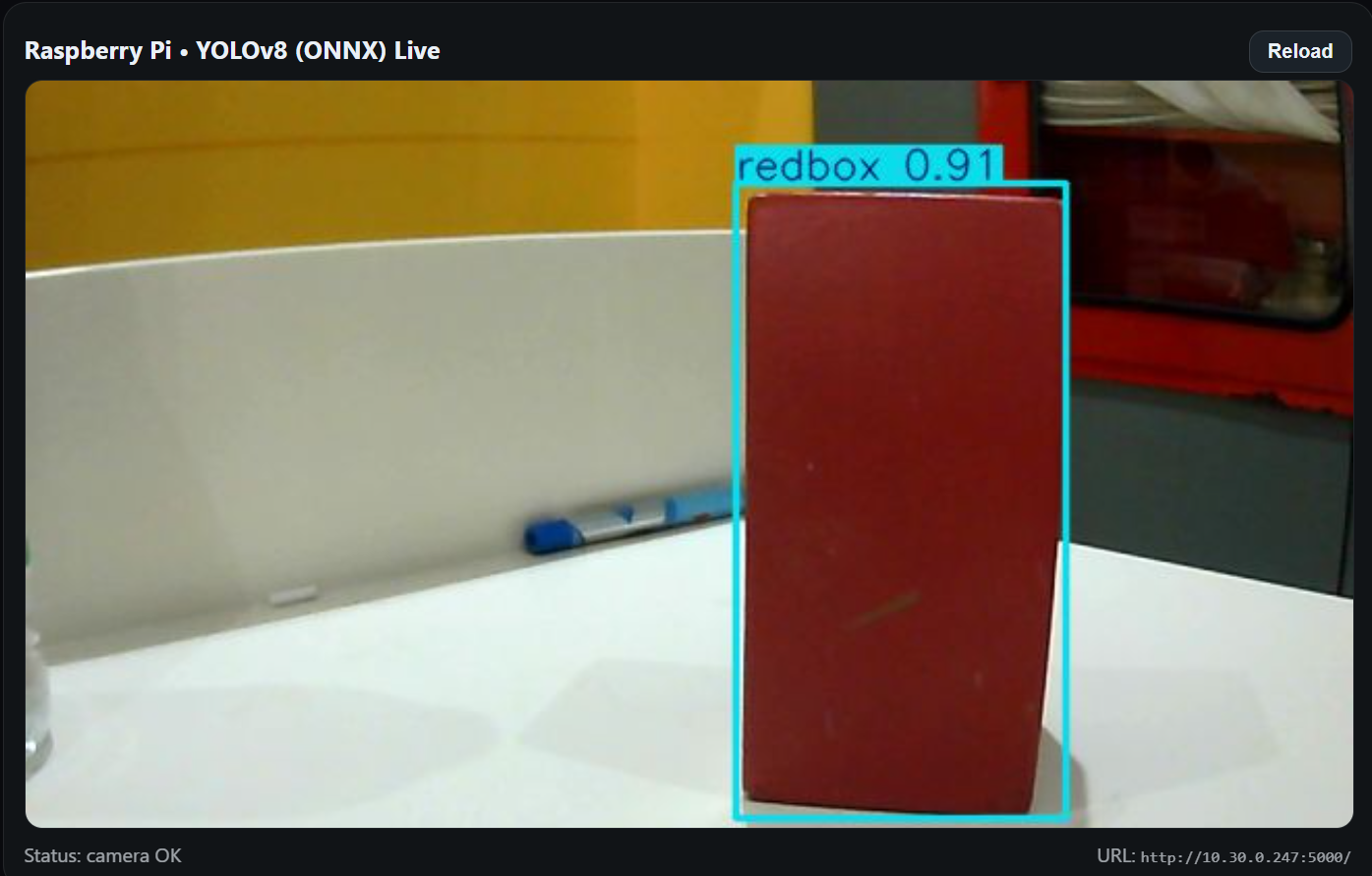
After that You will see the output as shown in the image below
-> Red Detection
-> Green Detection